원자력硏 로봇응용연구실 현장 취재
36년 로봇 연구 역사, 국내 최고 극한환경로봇 기술력 확보
우주항공·인공지능 등 첨단 로봇 기술 연구도 진행
‘핵분열’을 이용하는 ‘원자력’은 에너지원의 측면에서 가장 우수한 기술이다. 발전, 환경, 자원 등 모든 측면에서 뛰어나다. 특히 우리나라는 원자력 발전 의존도가 높다. 국내 전체 발전량 중 원전이 차지하는 비중은 29.6% 수준이다. 하지만 원자력 발전은 한순간의 실수가 치명적 사고로 이어진다. 체르노빌과 후쿠시마 원전 사고는 우리에게 뼈저린 교훈을 주었다. 이에 <시사위크>에서는 우리나라 원자력 연구의 중추인 ‘한국원자력연구원’을 방문, 국내 원전 안전 기술 현황에 대해 자세히 알아보고자 한다. [편집자 주]

시사위크|대전=박설민 기자 2011년 3월. 대지진 쓰나미로 폐허가 된 원전 속으로 181명의 사람들이 들어갔다. 과학자, 엔지니어, 소방관 등으로 구성된 이들의 목표는 하나. 후쿠시마 제1원전 내부의 방사능 물질 유출을 막는 것이었다. 내부 원전의 방사능 방출량은 400밀리시버트(mSv). 30분이면 1년치 피폭 허용량을 넘는 수치였다.
때문에 사고 당시 인간 작업자 대신 ‘로봇’을 투입해야 한다는 의견이 쏟아져 나왔다. 그러나 이는 불가능했다. 로봇 기술의 발전이 부족했던 탓이다. 수많은 로봇들이 현장에 투입됐지만 고농도 방사선을 버티지 못하고 몇 초 만에 작동을 멈췄다. 간신히 방사선을 버티고 원전 내부로 들어갔다 해도 임무 수행에 실패했다. 인간 작업자에 맞춘 사다리, 문, 계단 등 구조를 극복할 수 없었기 때문이다.
이 같은 한계를 느낀 과학자들은 원전 사고를 대비한 로봇 기술력 확보에 매진하기 시작했다. 우리나라도 원자력 과학자들도 마찬가지다. ‘한국원자력연구원(원자력연)’의 로봇응용연구실을 중심으로 다양한 원전 안전 관리 및 사고 수습 로봇 기술 연구가 이뤄지고 있다. 이에 <시사위크>에서는 원자력연 로봇응용연구실을 방문, 한국 원전 안전 로봇 연구의 역사와 개발 현황을 살펴봤다.

◇ 36년 역사가 담긴 로봇연구… 국내 최초 모바일 매니퓰레이터 로봇도 개발
지난 2월 26일 대전 유성구에 위치한 원자력연 본원 내부의 거대한 회색 창고 건물로 이동했다. 이곳은 원자력연의 로봇연구를 담당하는 ‘로봇응용연구실’. 이를 알리기라도 하듯 건물 외벽에는 ‘아이언맨’ 그림이 그려져 있었다.
연구소 내부로 들어서자 여러 대의 원전 안전용 로봇들이 눈길을 사로잡았다. 약간 낡아보이는 로봇들은 기대했던 것과는 조금 다른 모습이었다. 류동석 원자력연 로봇응용연구실장에 따르면 이 로봇들은 원자력연 로봇응용연구실에서 개발한 로봇의 프로토타입들이었다. 오랜 시간 진행돼 온 원자력연 로봇 연구의 역사가 담긴 모델이라고 한다.
잘 알려져 있지는 않지만 원자력연은 우리나라에서 가장 오래된 로봇연구기관 중 하나다. 1988년 전신인 ‘원자력ICT연구부 로봇·기기진단연구실’의 문을 연 후 36년의 시간 동안 원자력 안전성 확보와 작업 효율 극대화를 위해 다양한 로봇 기술 개발이 이뤄져 왔다. 이후 로봇응용연구로 개편돼 원자로 유지보수, 사고대응, 폐기물처리·관리와 핵테러·재난 대응 등에 필요한 극한작업 로봇기술 및 원격제어기술 등의 연구를 수행 중이다.

특히 원자력연은 국내 ‘모바일 매니퓰레이터 로봇’ 중점 연구 기관이기도 하다. 연구실 내부에 보관 중인 로봇 대다수도 ‘모바일 매니퓰레이터 로봇’들이었다. 모바일 매니퓰레이터 로봇(MMR)은 로봇 팔 장치를 모바일 로봇에 부착한 것이다. 로봇 팔의 정교한 작업 능력은 살리면서 이동성까지 갖춰 다양한 작업 현장에 투입 가능하다.
원자력연이 최초로 개발한 모바일 매니퓰레이터 로봇은 ‘소규모 임무 수행 모바일 로봇(Light-duty mobile robot)’이다. 지난 1988년 개발을 시작, 1992년 완성됐다. 이는 국내 최초의 모바일 매니퓰레이터 로봇이다. 이후 1996년 ‘다목적 모바일 로봇(Multi-purpose mobile robot)’, 2020년 ‘암스트롱(ARMstrong)’에 이르기까지 다양한 모바일 매니퓰레이터 로봇 개발이 이뤄졌다.
류동석 로봇응용연구실장은 “많은 분들이 잘 알지 못하지만 국내 로봇 산업과 연구가 태동하던 시기에 원자력 분야에서 관련 연구를 주도했다”며 “최근 산업계와 유통업계에서 주목받는 로봇 팔이 달린 모바일 로봇의 국내 최초 모델을 만든 곳이 바로 원자력연”이라고 말했다.
연구실 내부엔 다양한 로봇들의 성능 테스트를 위한 연구 시설도 두루 갖춰져 있었다. 연구실 내부에 자리 잡은 원자력 발전소 설비 모형들은 실제 원자로, 증기발생기 등 주요 장비와 크기 및 구조가 동일했다. 이 시설에서 로봇들을 테스트해 충분한 성능 검증을 마친 뒤 현장에 투입하게 된다.

◇ “뜯고 부수고 옮기고”… 극한 환경에 최적화된 로봇들
원자력연 로봇응용연구실에서는 여러 종류의 로봇이 개발되고 있지만 그중 단연 핵심은 단연 ‘암스트롱(ARMstrong)’이다. 암스트롱은 2018년부터 박종원 로봇응용연구실 선임연구원팀에서 개발한 원자력 사고대응 매니퓰레이터 로봇이다. 2011년 일본 후쿠시마 원전 사고와 같은 비상 상황에서 무인 대응을 하기 위해 개발됐다.
로봇연구실 내부로 들어서자 암스트롱이 눈에 들어왔다. 키 180cm, 몸 둘레 120cm, 무게 300kg의 거대한 붉은색 로봇에 위압감이 느껴졌다. 거대한 집게손, 포크레인이나 탱크에서 사용할 것 같은 궤도 바퀴는 영화 ‘월-E’에 등장하는 로봇 ‘WALL-E’를 연상케 했다. 물론 영화 속 로봇은 암스트롱보다 훨씬 더 작고 약해보이긴 한다.

이름에서 알 수 있듯 암스트롱의 양팔은 매우 강력한 힘을 낼 수 있다. 이진이 로봇응용연구실 선임연구원에 따르면 암스트롱의 각 팔에는 유압시스템을 적용했다. 이를 통해 한 손에 100kg의 물체를 번쩍 들 수 있을 정도로 강력하다. 양팔 끝에 달린 은색의 집게손은 약 1톤 정도의 강력한 악력을 낼 수 있다. 붕괴한 건물 잔해를 치우고 두꺼운 강철문을 뜯어내기 위함이다.
강력한 힘뿐만 아니라 암스트롱은 극한 환경에서 이동 및 작업이 자유롭다. 로봇 팔의 자유도(로봇 팔 관절 개수)는 8이다. 이를 통해 어떤 환경에서든 정밀 작업이 가능하다. 주행부를 담당하는 무한궤도 바퀴는 다양한 지면에서 최대 시속 6km의 속도로 이동 가능하다. 이진이 선임연구원에 따르면 계단, 언덕, 구덩이 등 원전 사고 현장도 문제없이 주행할 수 있다고 한다.
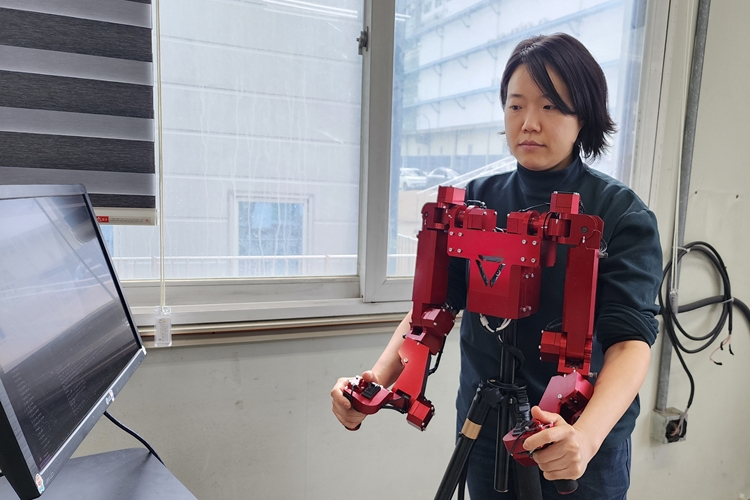
암스트롱의 또 다른 특징은 쉬운 조작법이다. 이는 ‘원격제어기’ 덕분이다. 아이언맨에 등장하는 로봇처럼 보이는 붉은색 제어기를 손으로 잡고 움직이면 암스트롱의 팔도 저절로 움직인다. 이를 통해 복잡한 핸들 장치나 소프트웨어를 구동할 필요 없이 누구나 쉽게 암스트롱으로 작업할 수 있다.
이진이 선임연구원은 “실제 원전 사고 발생 시 인명 구조와 방사능 물질 유출 방지는 골든타임 확보가 필수인데 로봇 전문가들이 달려와 작업하면 이를 놓칠 수도 있다”며 “소방관, 경찰, 경비원 등 로봇 비전문가들도 빠른 조치를 할 수 있도록 하기 위해 암스트롱의 원격제어기를 개발했다”고 말했다.

암스트롱과 함께 여러 종류의 탐색 로봇들도 다수 개발되고 었다. 대표적인 것으로 신호철 책임연구원이 개발한 ‘뱀 로봇(Snake Robot)’이다. 로봇을 이룬 여러 개의 관절은 실제 뱀의 신체구조를 생체 모방해 설계한 것이다. 이를 이용해 로봇은 수직으로 놓인 배관 외부를 휘감아 뱀처럼 기어오를 수 있다. 또 화재, 지진 등으로 무너진 건물 안으로 들어가 현장 상황, 생존자 탐색 등의 임무도 수행할 수 있다. 내부에 강력한 배터리를 탑재해 한번 충전으로 장시간 작업이 가능하다.
‘방사선 관리구역’ 작업을 위한 로봇들도 개발되고 있었다. 방사선 관리구역은 강한 방사선과 높은 온도, 압력 때문에 사람이 들어갈 수 없는 장소다. 원전의 중수로, 배관 속 등이 여기에 속한다.
방사선 관리구역 로봇으로는 ‘수중 유지보수로봇’이 대표적이다. 원자로 압력용기 내부에는 냉각을 위한 물이 가득 차 있다. 중수로의 경우엔 ‘중수(D₂O)’를, 가압경수로에선 ‘경수(H₂O)’를 사용한다. 이 물은 핵연료와 직접적으로 닿기 때문에 방사능 수치가 매우 높다. 때문에 그 안에 작은 잠수함처럼 생긴 수중 유지보수로봇을 투입해 시설 상태 점검 및 유지보수를 진행하게 된다. 또한 압력용기 내부에 쌓이는 슬러지(침전물)을 제거하기도 한다.

◇ 우주항공·AI 등 새로운 첨단 로봇 기술 개발도 ‘현재진행형’
여러 로봇들을 살펴보던 도중 ‘위잉’ 소리가 들렸다. 4개의 바퀴가 달린 로봇이 움직이고 있었다. 원자력연·지질연 연구진들이 로봇을 조종해 달 표면 모의 실험장으로 이동시켰다. 잠시 멈칫하던 로봇은 울퉁불퉁한 지형을 인식한 후 자유롭게 움직이기 시작했다.
이 4륜 로봇은 원자력연과 한국지질자원연구원(지질연)이 달 표면의 우주 탐사 연구를 추진하기 위해 공동으로 개발한 것이다. 우주환경은 진공, 저중력, 극한온도변화, 방사선 등으로 인해 일반적인 로봇이 정상적으로 작동 불가능하다. 때문에 극한 우주환경에서 버틸 수 있는 탐사 로봇 개발 연구가 필수다. 원자력연이 핵심연구기관으로 참여하게 된 이유다.

로봇 몸체는 원자력연에서, 내부 지형 탐지 센서는 지질연에서 각각 개발해 통합했다. 양 기관은 한국 달착륙선 탑재체 공동 기획, 아르테미스 국제협력 공동 추진, 국내 산업체와 민간협력 및 지난해 10월 ‘우주탐사·개발 로봇챌린지’를 개최하는 등 우주 탐사 로봇 기술 개발에 지속적으로 협력 중이다.
류동석 로봇응용연구실장은 “뜨겁고 차가운 온도, 압력 등의 요인을 비롯해 강력한 방사선이 내리 쬐는 측면에서 원자력 환경과 우주 환경은 유사한 극한환경 기술이 적용된다”며 “원자력연이 국내서 가장 뛰어난 방사선 극한환경 연구 기관인 만큼 우주 극한환경의 탐사 로봇의 기술 개발 및 테스트를 진행하고 있다”고 말했다.
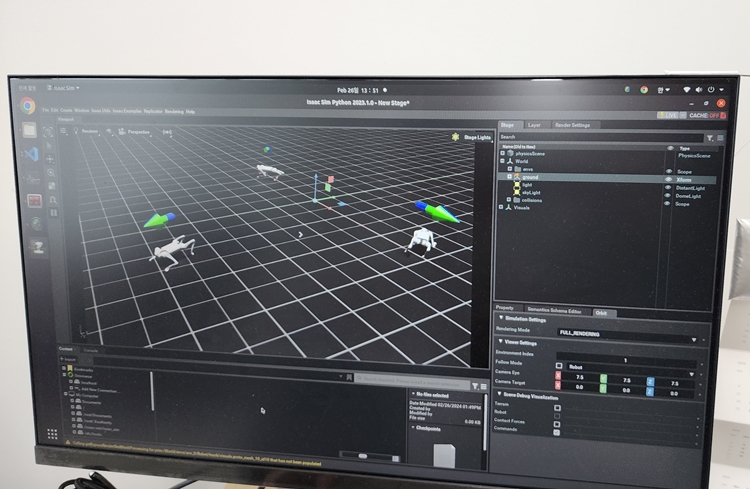
아울러 로봇응용연구실에서는 로봇의 정밀 주행을 위한 ‘인공지능(AI)’ 기술 개발도 이뤄지고 있었다. 가장 눈에 띄는 것은 이원서 선임연구원이 담당하고 있던 ‘4족 보행 로봇 제어 AI’ 기술이었다. 컴퓨터 모니터에는 로봇 개 ‘스팟(Spot)’처럼 보이는 4족 보행 로봇의 3D영상이 재생됐다. 구현된 로봇 그래픽의 머리 위에는 화살표 2개가 달려 있었다.
이 연구는 4족 보행 로봇을 ‘강화 학습’으로 제어하는 연구다. 강화학습은 AI가 변화하는 환경에서 반복적 시행착오·상호작용을 거치며 작업 수행 방법을 학습하는 방법이다. 쉽게 말해 AI가 여러 실수를 반복하며 가장 정답에 가까운 결과를 도출하는 과정이라 볼 수 있다. 현재 세계적 열풍을 일으키고 있는 AI챗봇 ‘챗GPT’ 역시 강화학습을 기반으로 만들어진 것이다.
이원서 선임연구원은 “일반 고전적 자율주행 AI의 경우 평지나 건물에서는 성능이 우수하지만 원전 내부나 사고 현장 등 극한 환경에서는 제 기능을 발휘하기 어렵다”며 “이 같은 환경에 대응하기 위해 새로운 로봇 주행 제어 AI기술을 개발하고 있다”고 말했다.
이어 “연산속도가 굉장히 빠른 AI신경망인 ‘심층신경망(DNN)’을 적용, 실시간으로 AI에게 정확한 주행 방법을 학습시키고 있다”며 “모니터 화면의 초록색 화살표는 올바른 로봇의 주행 방향, 파란색은 일부러 틀리게 입력한 것으로 이 두 가지 정보의 충돌을 AI가 학습하면서 가장 정확한 결과를 최종적으로 도출하게 된다”고 설명했다.