‘인공근육’, 생체 모방형 로봇 구동 한계 넘을 ‘열쇠’
로봇 의수 등 응용 가능성 높지만 기술적 한계는 ‘숙제’

시사위크=박설민 기자 우리가 일하는 거의 모든 작업 환경은 인간의 신체 구조에 최적화된 곳이다. 때문에 아무리 강력한 작업 로봇이 등장해도 할 수 있는 일은 한정적일 수밖에 없다. 여러 가지 ‘로봇’ 성능 평가 지표 중엔 ‘얼마나 인간처럼 일할 수 있는가’도 포함되는 것도 이 때문이다. 이에 대다수 로봇 개발자는 인간의 신체를 모방한 로봇을 개발하고자 노력하고 있다. 최근 국내외 과학계에서 신소재를 활용한 ‘인공근육’ 연구가 활발히 진행되고 있는 것도 이 같은 이유에서다.
◇ 인간 근육 닮은 ‘인공근육’… 생체 모방형 로봇 발전의 핵심 기술
인공근육(Artificial muscle)은 생체근육의 움직임과 기능을 모방해 움직이는 구동기를 뜻한다. 쉽게 말해 전기에너지를 운동에너지로 변환시켜 인간 근육의 움직임과 유사하게 작동하는 기계장치라고 볼 수 있다. 주로 탄소나노튜브, 그래핀, 나일론 등 신소재를 활용해 제작한다.
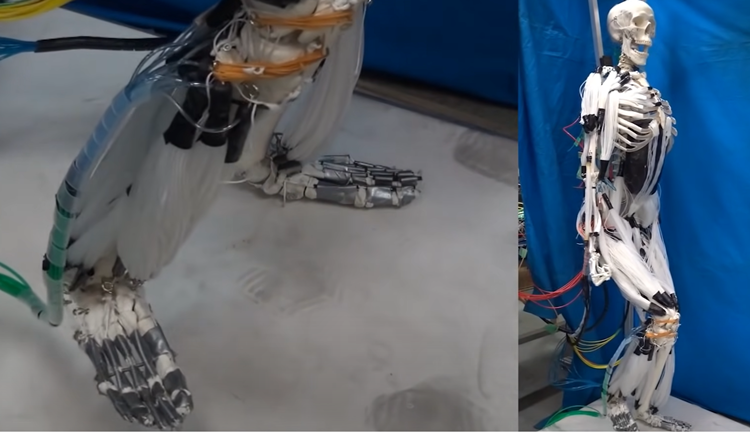
로봇 기술 개발에 인공근육이 주목받는 이유는 인간 신체 움직임의 정확한 재현을 위해서다. 인간의 동작은 뼈대뿐만 아니라 근육, 피부가 동반된 것이다. ‘휴머노이드 로봇’을 포함해 대부분의 인간형 로봇은 손가락·다리 등 뼈대를 흉내 낸 형태다. 로봇을 움직이는 동력은 전기모터나 유압식 펌프로 공급한다. 때문에 움직임이 부자연스러운 경우가 많고 동작 반경도 한정돼 있다.
반면 인공근육을 사용하면 훨씬 더 자연스러운 로봇의 움직임을 구현할 수 있다. 예를 들어 팔다리 로봇 골격 앞뒤에 인공근육을 붙인 후 길이를 조절하면 사람이 팔다리를 접었다 펼 때처럼 근육이 늘어났다 줄어 자연스러운 동작이 가능하다.
오일권 KAIST 기계공학과 교수는 <시사위크>와의 통화에서 “사람이나 동물과 같은 생물체가 움직이는 메커니즘은 생체 근육이 핵심”이라며 “기존 로봇이나 기계 시스템의 대부분은 전기 모터로 구동해 동작 효율에 한계가 있는 만큼 인공근육을 개발하려는 움직임이 최근 많아지고 있다”고 설명했다.로봇 공학자들 역시 인공근육이 미래 생체 모방형 로봇 기술 개발의 중요한 축이 될 수 있다고 보고 있다.
배지훈 한국생산기술연구원 AI·로봇연구부문 수석연구원은 <시사위크>와의 통화에서 “근육으로 움직이는 사람의 관절은 저속으로 움직이면서도 높은 회전힘을 가지고 있지만 로봇은 그렇지 못하다”며 “조금의 힘으로도 고출력의 움직임을 낼 수 있는 사람 근육을 모방할 수만 있다면 로봇 연구에 큰 도움이 될 수 있다”고 설명했다.
한재권 한양대 로봇공학과 교수 겸 에이로봇(A.robot) CTO도 <시사위크>와의 통화에서 “현재 개발된 구동기는 인간 근육에 비하면 무게 및 부피 대비 에너지 효율이 너무 좋지 않다”며 “인간 근육처럼 작은 크기와 가벼우면서도 적은 에너지로 큰 힘을 낼 수 있는 구동기가 개발된다면 로봇 기술은 한 단계 더 도약할 수 있을 것이고 인공근육은 그 중 하나의 중요한 시도”라고 말했다.
◇ 과학계 연구 활발… KAIST 중심으로 국내 연구진 ‘약진’
인공근육과 관련해 최근 발표된 연구 사례 중 눈에 띄는 것은 런던 퀸메리대학교 재료과학부 연구팀의 것이다. 퀸메리대 연구팀은 실리콘으로 코팅된 탄소나노튜브를 이용, 근육 무게 대비 30배 강력한 힘을 낼 수 있는 인공근육 개발에 성공했다. 연성도 강력해 200%까지 늘어나기도 한다.
퀸메리대 연구팀은 “새롭게 개발한 인공근육은 소프트 로봇 작동을 한 단계 더 발전 시켰다”며 “전기적 반응성도 높아 기존 소프트 액추에이터보다 더 빠르게 작동할 수 있다”고 밝혔다.
국내 연구진도 세계 최고 수준의 인공근육 기술력을 보유하고 있다. 그 중심에 있는 곳은 ‘한국과학기술원(KAIST)’이다. 지난 4일 오일권 KAIST 기계공학과 교수팀은 매우 작은 전기에너지만으로도 작동 가능한 인공근육 소자 개발에 성공했다고 밝혔다.
연구팀이 개발한 인공근육은 금속 전극과 이온성 고분자로 구성됐다. 인공근육 전극 표면에 유기 분자를 결합해 여러 개의 구멍이 뚫린 ‘다공성 공유결합성 유기 골격구조체 (pS-COF)’ 형태로 제작됐다. 이 구조는 원활한 이온 교환 유발이 가능하다. 때문에 일반 이온성 고분자 소자보다 전기가 훨씬 잘 통한다. 0.01V의 매우 작은 전력에서도 인공근육이 작동한다.
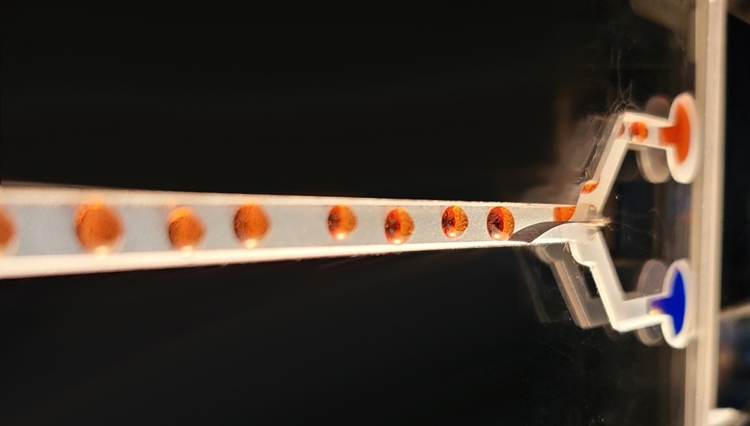
얇은 두께에서도 강력한 힘을 발휘할 수 있는 것도 이번에 개발된 인공근육 소자의 장점이다. 연구팀은 머리카락 정도 얇은 굵기 수준인 180μm의 인공근육 소자를 제작했다. 그 다음 얼마나 강력한 힘을 낼 수 있는지 테스트를 진행했다. 그 결과 무게 대비 34배 이상의 큰 힘을 낼 수 있는 것으로 확인됐다.
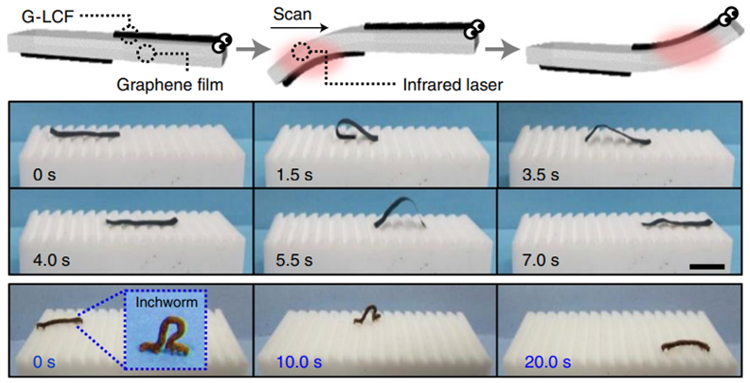
김상욱 KAIST 신소재공학과 교수팀이 개발한 ‘헤라클레스 인공근육’ 기술도 주목할 만하다. 헤라클레스 인공근육은 그래핀 소재와 액정섬유를 결합한 복합소재로 제작됐다. 사람의 근육과 유사한 방식으로 운동할뿐만 아니라 훨씬 더 강력한 힘을 낼 수 있다. 연구팀에 따르면 인간 근육보다 최대 17배 강력한 힘을 낼 수 있다고 한다.
해당 연구는 5일 그 기술력을 인정받아 ‘국제화학연합(IUPAC)’이 선정하는 ‘2023년 10대 유망기술’로 선정됐다. 1919년 설립된 IUPAC는 세계 최대의 국제 화학·소재분야 학술기관이다. 2019년부터 매년 가장 우수한 유망기술 10개를 선정해 발표한다. 또한 헤라클레스 인공근육은 과학기술정보통신부가 선정하는 ‘2023년 기계·소재 부문 국가연구개발 우수성과 100선’에도 선정된 바 있다.
연구를 주도한 김상욱 교수는 “이번 IUPAC 10대 유망기술 선정은 국내 연구진들의 인공근육 기술력이 대외적으로 인정받은 것”이라며 “미래 사회에 대두될 과학기술 분야에서도 큰 역할을 할 것으로 기대된다”라고 전했다.
◇ 관련 산업도 빠르게 성장… 느린 반응 속도 등은 넘어야할 산
국내외 연구기관들과 기업에서 인공근육 연구에 매진하는 이유는 향후 경쟁력 있는 산업 분야가 될 수 있다는 기대감이 크기 때문이다. 제조, 헬스케어, 물류 등 다양한 분야에서 로봇 활용이 확대되면서다.
실제로 인도시장조사업체 ‘인사이트에이스애널리틱스(insightace analytics)’에 따르면 로봇 인공근육 산업 규모는 2022년 기준 22억3,000만달러, 한화 약 3조원 규모다. 연평균 성장률 10.4%로 오는 2031년엔 53억6,000만달러(약 7조원)까지 성장할 전망이다.
글로벌시장조사업체 ‘프레지던스 리처치’는 “최근 인간의 움직임을 모방하고 보다 정교하게 주변 환경과 상호 작용할 수 있는 로봇에 대한 수요가 증가하고 있다”며 “전기 모터 및 유압 시스템과 같은 기존 로봇 구동기의 유연성과 동작 범위는 제한돼 있는 반면 인공근육은 로봇 공학 응용 분야에 완벽하게 어울리는 이상적 구동기술”이라고 분석했다.
산업뿐만 아니라 의료용 로봇도 인공근육의 주요 응용처가 될 전망이다. 특히 신체가 절단되거나 마비된 환자들을 위한 로봇용 의수 개발에 인공근육은 매우 활용도가 높다. 일반적으로 로봇 의수에 사용되는 전기 모터, 유압식 방식보다 훨씬 가볍고 소음도 적어서다.

인도시장조사기관 ‘아스튜트애널리틱카’는 “로봇형 인공근육이 가진 가벼운 무게, 유연성, 적은 소음 등은 실제 의수를 착용하는 환자들에게 있어 매우 중요한 이점”이라며 “인공근육 기반 로봇 의수는 절단 수술을 받은 환자들의 삶의 질 향상에 큰 보탬이 될 것”이라고 기대했다.
다만 아직까지 인공근육이 전기모터와 유압기를 대체하긴 힘들다는 게 전문가들의 공통된 입장이다. 구동 속도가 매우 느리기 때문이다. 일반적으로 인공근육은 수축·이완하기 위해 열이나 전기에너지가 사용된다. 이때 다시 원래 형태로 돌아가기 위해선 전기 신호를 받거나 열이 식기를 기다려야 한다. 때문에 빠른 속도로 돌아가는 모터나 유압기에 비해선 구동 속도가 현저히 떨어질 수밖에 없다.
배지훈 한국생산기술연구원 수석연구원은 “인공근육은 에너지 효율 등에서 우수하지만 결정적 단점은 반응 속도가 너무 느린 것”이라며 “현재 기술력으론 전동 모터처럼 빠른 작업이 불가능해 인공근육이 생체 모방형 로봇 적용되기 위해선 더 많은 기술 발전이 필요하다”고 말했다.
오일권 KAIST 교수는 “원천적으로 과학자들이 인공근육 연구를 시작했을 때 사람이나 동물의 근육 움직임 형태를 모방하겠다는 목표가 깔려 있었다”며 “최종적으로 휴머노이드, 생체 모방형 로봇의 구동장치가 인공근육이 될 것이라 보지만 아직 성능이 전동 모터를 넘기엔 부족해 최소 10년 이상의 연구 기간이 필요하지 않을까 생각한다”고 설명했다.